| Index |
 Index forum
Index forum |
 Autentificare
Autentificare |
 Inregistrare
Inregistrare
|
 Cine este online
Cine este online |
 Galerie imagini
Galerie imagini
|
 Calendar evenim.
Calendar evenim. |
 Cautare detaliata
Cautare detaliata |
 Ghid forum
Ghid forum |
Colaboratori
Te intereseaza un domeniu al astronomiei si ai vrea sa scrii pentru siteul nostru? Alatura-te echipei noastre.
| Statistici forum |
| › |
Numar total de mesaje in forum: 236244 |
| › |
Numar de utilizatori inregistrati: 2872 |
| › |
Cel mai nou utilizator inregistrat: Romero Gumendo |
| › |
|
| › |
Cei mai multi utilizatori conectati au fost 830 la data de Mar Iun 03, 2025 |
| › |
|
| › |
Actualmente sunt 0 utilizatori pe chat
|
| › |
Aceste date se bazeaza pe utilizatorii activi de peste 5 minute |
|
| Legenda |
 |
Mesaje noi |
 |
Nu sunt mesaje noi |
 |
Forumul este inchis |
|
|
| Subiectul anterior :: Subiectul urmator |
|
| Autor |
Mesaj |
valy
Membru

Data inscrierii: 21 Iul 2005
Mesaje: 11385
Localitate: Bucuresti
|
| Trimis: 20 Dec 2011 15:52 Download mesaj |
| Titlul subiectului: Controller |
") |
|
|
Ma simt confuz in ceea ce priveste controlul monturii din PC. Asa ca am decis sa continui un mai vechi proiect ( http://valistoica.blogspot.com/2009/04/minitehnicus.html ), adoptand "the right way", cred eu.
Astfel tocmai am comandat un http://arduino.cc/en/Main/ArduinoBoardUno cu un driver de motor si un motor mai mititel.
Este vorba de o placa si un microcontroler, ansamblu complet, opensource, pentru dezvoltare de proiecte DIY. Are si driverele de USB de comunicare cu PC-ul, are IDE (tool soft de dezvoltare) folosind un limbaj similar cu C. Din 3 linii de cod pot genera la iesire semnal digital care sa comande un driver si un motor stepper pt. montura de exemplu.
De aici pana la a face un astrotrack nu e decat un pas. Astfel intr-o cutiuta mica, usoara, portabila pot face astrotrack si nu numai.
Proiectele pe care le am in cap sunt cel putin 3:
- autoastrotrack
- tracking de obiecte
- timelapse dolly
Sa le luam pe rand.
1. Astrotrack
Aici o sa fac un prim experiment: pe axa RA generez constant impulsuri, pe DEC nimic. Prin ocular vaz daca steaua ramane centrata, daca nu, modific viteza pe RA, eventual adaug impulsuri si pe DEC. Dupa o monitorizare de cateva (zeci) de minute banui ca pot corecta eventualele abateri de punere in pol ale monturi si pot genera impulsurile corecte pt. RA si DEC astfel incat sa pot face tracking cu timpi relativ scurti (cateva minute). Probabil ca se vor obtine performante mai bune decat simplul controler cu care vine EQ5.
Ulterior pot pune si o placa suplimentara daca portul USB existent nu se dovedeste suficient, prin care sa pot controla controlerul din laptop pe USB (autotrack pe bune).
2. Tracking
Avioane, ISS si alte OZN-uri. Practic o sa plec de la ideea anterioara si din butoane sa incerc urmarirea obiectului. Voi tine seama de anumite particularitati:
- avioanele/ISS zboara liniar
- pe una din axe viteza variaza pe masura ce se apropie/departeaza, modulez (controlez) acceleratia
- pe cealalta axa va trebui sa corectez constat abaterea monturii de la traiectoria liniara de deplasare a obiectului
Mai trebuie rezolvat si focusul, va trebui motorizat si controlat si focuserul. Aici poate fi focus manual (ma uit si vad daca e ok, daca nu, mai refocusez), sau automat, pot face contrast detection AF (deci control din laptop prin USB)
3. Time lapse dolly
Aici treaba e relativ simpla:
- misc aparatul putin
- dau semnal sa declanseze
- cand termna, iar misc putin
- bucla infinita pana se termina sina pe care deplasez aparatul
Partea interesanta e ca Arduino se poate conecta la milioane de alte deviceuri (ethernet, wireless, camere video, display-uri, butoane, joistick-uri, controlere, tastaturi, mousi, etc). Sunt multe proiecte pe net, multe idei se pot implementa.
Probabil veti zice ca reinventez apa calda. Dar e simpatic sa poti face tu focul, sa ai propria ta apa calda.
|
|
| Sus |
|
 |
Alexandru I.
Membru

Data inscrierii: 06 Sep 2010
Mesaje: 27
Localitate: Reghin, MS
|
|
| Sus |
|
|
Erwin
Moderator


Data inscrierii: 02 Aug 2008
Mesaje: 9757
Motto: panta rhei
Localitate: Bucuresti
|
| Trimis: 22 Dec 2011 00:49 Download mesaj |
| Titlul subiectului: |
| |
|
|
Interesant, Valy! Eu am 2 controlere mpp şi 2 motoare destul de puternice să mişte minifreza. Însă interfaţa e cu port paralel la un PC (care poate fi unul vechi) şi nu am decuplare galvanică la el, nu are optocuploare. Controlerele mele au intrare de enable, step şi direction. Câte motoare poţi comanda cu kit-ul tău având fiecare cele 3 semnale necesare?
_________________
bino: 8x22, 7x42, 10x50, 10x80, spotting: 10x46, 20x60
Telescoape RFT70 F/4, 80/900, RFT 110 F/5.5, Meade 90 F/10, ED80 F/6
MTO-11CA 100/1000, Cass Clasic 8"F/15, dobson newt.158/1240 DH, 4"F/4.6
piston AZ mount (R), Vixen GP, minidob |
|
| Sus |
|
|
valy
Membru
Data inscrierii: 21 Iul 2005
Mesaje: 11385
Localitate: Bucuresti
|
| Trimis: 22 Dec 2011 12:27 Download mesaj |
| Titlul subiectului: |
| |
|
|
Nu stiam site-ul. Defapt sunt multe resurse pe net, atat pe partea de aplicatii arduino cat si de dolly. Multumesc.
O alta aplicatie interesanta, am vazut ca e fezabila: sa pozezi fulgere. Iti trebuie doar o simpla fotodioda sau ceva care sa detecteze variatii de lumina. Nu stiu in ce masura poate fi folosit si la meteori, probabil depinde de sensibilitatea ei.
Erwin, vrei sa-ti faci CNC?
Din cate vad in specificatii are 16 pini digitali I/O, ar fi cam 2 pini per motor, in ideea ca nu ai nevoie si de enable, deci 7 motoare. Mai sunt si porturile analogice, ma gandesc ca se pot utiliza si ele. Deocamdata nu sunt lamurit daca poate fi comandat prin USB din PC, in ideea ca nu mai trebuie sa consumi niste pini ca sa comanzi microcontrolerul. Mai studiez asta.
O sursa de kituri, motoare, controlere, piese CNC, etc e si aici: http://hi-end.ro/
|
|
| Sus |
|
|
Erwin
Moderator
Data inscrierii: 02 Aug 2008
Mesaje: 9757
Motto: panta rhei
Localitate: Bucuresti
|
| Trimis: 22 Dec 2011 13:35 Download mesaj |
| Titlul subiectului: |
| |
|
|
Demult am tot adunat piese din imprimante A3 cu ace pentru un CNC sau un 3D printer. Acum că am minifreza funcţională aş putea să o motorizez. Teoretic trebuie 4 canale: 3 axe plus pornire/oprire axul maşinii. Intrări trebuie mai multe pentru limitatoare de cursă şi o serială pentru legătura cu PC-ul care trimite comenzile în C-code (cod maşină pentru CNC). Nu ştiu dacă e loc destul în memoria lui Arduino pentru toate comenzile, dar măcar câteva de bază+corecţii de sculă trebuie să ştie. Controlerele le am de la www.probotix.com . Info pt. CNC pe www.cnczone.com . Dar mă gândesc să fac o treabă modulară, la o adică să pot pune schema şi la alte automatizări.
_________________
bino: 8x22, 7x42, 10x50, 10x80, spotting: 10x46, 20x60
Telescoape RFT70 F/4, 80/900, RFT 110 F/5.5, Meade 90 F/10, ED80 F/6
MTO-11CA 100/1000, Cass Clasic 8"F/15, dobson newt.158/1240 DH, 4"F/4.6
piston AZ mount (R), Vixen GP, minidob |
|
| Sus |
|
|
valy
Membru
Data inscrierii: 21 Iul 2005
Mesaje: 11385
Localitate: Bucuresti
|
| Trimis: 22 Dec 2011 13:49 Download mesaj |
| Titlul subiectului: |
| |
|
|
Arduino mega are miliarde de I/O-uri, comazi tot in casa cu el: http://arduino.cc/en/Main/ArduinoBoardMega2560. Eu am luat modelul Uno care are mai putin dar cred ca sunt suficiente.
Controlerul poate functiona in 2 moduri:
- independent, dar aici iti trebuie un ecran pt. info, sa stochezi diverse comenzi simple, iti trebuie butoane, etc. Am vazut ca un program simplu are 3k, el avand memorie de 32k parca. Arduino mega are 256k.
- doar ca intermediar/controler pt. motoare, comenzile propriuzise sa vina din PC, aici n-ai limitari.
Arduino e foarte flexibil, poti incarca diverse programe pt. diverse aplicatii, incarci programul de meteoriti, pozezi meteoriti, incarci pt. montura EQ, faci astrofoto, incarci pt. CNC, faci CNC, si tot asa.
Ce-mi place e ca in 5 min. poti face un soft si poti folosi controlerul pt. control de motor. Are si I/O analogice cu convertor inclus pt. semnale/senzori/potentiometre analogice. Din linii de cod gen GET/SET poti citi/scrie foarte simplu pe porturile analog/digital. Alimentarea e flexibila 7-12V, are el stabilizator convertor la 5, 3.3 (depinde la cat merge microcontrolerul).
|
|
| Sus |
|
|
Erwin
Moderator
Data inscrierii: 02 Aug 2008
Mesaje: 9757
Motto: panta rhei
Localitate: Bucuresti
|
| Trimis: 23 Dec 2011 00:25 Download mesaj |
| Titlul subiectului: |
| |
|
|
E foarte util aşa un microcontroler pentru că indiferent de aplicaţie este o interfaţă inteligentă şi degrevează calculatorul de sarcinile real-time pe care un sistem de operare M$ nu-ţi permite să le faci.
_________________
bino: 8x22, 7x42, 10x50, 10x80, spotting: 10x46, 20x60
Telescoape RFT70 F/4, 80/900, RFT 110 F/5.5, Meade 90 F/10, ED80 F/6
MTO-11CA 100/1000, Cass Clasic 8"F/15, dobson newt.158/1240 DH, 4"F/4.6
piston AZ mount (R), Vixen GP, minidob |
|
| Sus |
|
|
nobody
Membru
Data inscrierii: 02 Apr 2010
Mesaje: 5204
Motto: Never ever give up !
Localitate: Nowhere
|
| Trimis: 23 Dec 2011 08:39 Download mesaj |
| Titlul subiectului: |
| |
|
|
Erwin, ce ai tu pe portul paralel este, de fapt, un driver iar PC-ul il folosesti pe post de controller.
Arduino este un kit bazat pe ATmega de la Atmel care are o interfata de programare high-level, mai usor de abordat de catre incepatori sau neprofesionisti. Pe de alta parte, nu este chiar asa flexibil. Exista kit-uri mult mai avansate cu tot felul de module dar care necesita cunostiinte mai avansate.
Valy, comunicatia se face pe USB cu ajutorul celui de al doilea microcontroller integrat in kit (tot Atmel, se poate vedea langa conectorul de USB). Acesta comunica cu microcontrollerul principal pe un port serial dedicat.
|
|
| Sus |
|
|
Erwin
Moderator
Data inscrierii: 02 Aug 2008
Mesaje: 9757
Motto: panta rhei
Localitate: Bucuresti
|
| Trimis: 23 Dec 2011 15:50 Download mesaj |
| Titlul subiectului: |
| |
|
|
Da, aşa este, am scris greşit controler în loc de driver. Driverele pe care le am sunt bazate pe chip-ul A3977 de la Allegromicro. Am avut 3 dar unul s-a ars, am schimbat chip-ul însă tot nu merge. Pentru a treia axă o să cumpăr probabil ceva similar, cu A3967, chiar dacă e mai mic, motorul pe Z nu e atât de solicitat.
_________________
bino: 8x22, 7x42, 10x50, 10x80, spotting: 10x46, 20x60
Telescoape RFT70 F/4, 80/900, RFT 110 F/5.5, Meade 90 F/10, ED80 F/6
MTO-11CA 100/1000, Cass Clasic 8"F/15, dobson newt.158/1240 DH, 4"F/4.6
piston AZ mount (R), Vixen GP, minidob |
|
| Sus |
|
|
valy
Membru
Data inscrierii: 21 Iul 2005
Mesaje: 11385
Localitate: Bucuresti
|
| Trimis: 24 Dec 2011 02:45 Download mesaj |
| Titlul subiectului: |
| |
|
|
| nobody a scris: | Pe de alta parte, nu este chiar asa flexibil. Exista kit-uri mult mai avansate cu tot felul de module dar care necesita cunostiinte mai avansate.
|
Scuze, cand am zis flexibil m-am referit la tipul asta de aplicatii simple. Ma gandisem chiar la autotrack pe bune, integrat cu webcam dar am aflat ca nu e suficient de rapid pt. procesari video. Banui ca exista si kituri mult mai avansate insa aici e vorba de cineva cu experienta aproape 0 in domeniul asta. Mi-a placut remarca unui tip de pe un forum legata de arduino: eram obisnuit sa citesc 2000 de pagini de documentatie inainte sa ma gandesc sa il folosesc, insa cu arduino am facut un program in 5 min.
Cred ca m-am lamurit si cu USB-ul, defat e un port serial, insa imi era teama ca poate fi folosit doar ca sa transfer programul din PC catre microcontroler, dar vad ca poate fi folosit si ca comunciatie seriala dupa ce programul a fost transferat, asa ca pot sa fac si autotracking din laptop. Deci din punctul meu de vedere e flexibil 
|
|
| Sus |
|
|
valy
Membru
Data inscrierii: 21 Iul 2005
Mesaje: 11385
Localitate: Bucuresti
|
| Trimis: 07 Ian 2012 02:03 Download mesaj |
| Titlul subiectului: |
| |
|
|
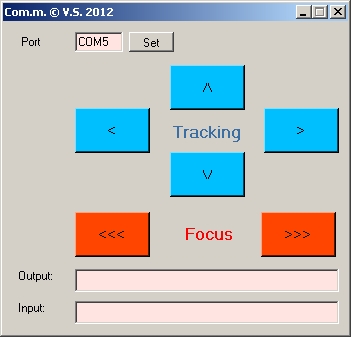
Deci first step first: comunicatia PC<->arduino prin USB (defapt e un COM serial).
De pe PC trimit comenzi (C#):
| Cod: | using System.IO.Ports;
...
SerialPort port = new SerialPort("COM5", 9600, Parity.None, 8, StopBits.One);
port.Open();
port.Write("Hello world!");
port.Close();
... |
Pe arduino primesc si trimit inapoi (ceva gen C):
| Cod: | void setup() {
// initialize serial:
Serial.begin(9600);
}
void loop() {
}
void serialEvent() {
while (Serial.available()) {
// get the new byte:
char inChar = (char)Serial.read();
//send it back
Serial.write(inChar);
}
} |
In mod surprinzator merge din prima (testat pe Win7 x64).
| Descriere: |
|
| Marime fisier: |
40.36 kb |
| Vizualizat: |
de 8119 ori |
|
|
|
| Sus |
|
|
valy
Membru
Data inscrierii: 21 Iul 2005
Mesaje: 11385
Localitate: Bucuresti
|
| Trimis: 18 Ian 2012 01:10 Download mesaj |
| Titlul subiectului: |
| |
|
|
Am reusit sa invart un motor de la EQ5. Initial setasem maxim 1000 impulsuri pe sec. dar se pare ca e cam putin, banui ca are demultiplicare destul de mare si se invarte destul de lent pt. obiecte mai rapide. N-am testat decat in conditii "de laborator", nu-mi dau seama pe montura cum se comporta dar pare mai putin de 32x, asta asa ochiometric. O sa incerc 10.000/sec sa vad cum merge, sper sa reziste motorul. Controlerul era alimentat din USB, tot prin USB il controlam din laptop. Driverul (si implicit motorul) era alimentat din 6V (4x1.5V).
Controlul vitezei de rotatie era din laptop prin USB deci se pare ca toata arhitectura merge ok: soft+usb+controler+driver+motor.
|
|
| Sus |
|
|
jimao22
Moderator

Data inscrierii: 12 Apr 2010
Mesaje: 2920
Motto: [descopera lumina]
Localitate: Ploiesti
|
| Trimis: 18 Ian 2012 02:40 Download mesaj |
| Titlul subiectului: |
| |
|
|
Interesant ce faci tu. Inainte sa-mi iau SELETEK-ul ce controleaza in primul rand focuserul meu motorizat, ma batea si pe mine un gand sa fac asta comandat de un ARDUINO. Am intrat pe site-ul distribuitorului roman si l-am intrebat daca ma poate ajuta in treaba asta, dar si-a declinat competanta.
Nu stiu ce sa zic, tu ai reusit sa faci asta relativ repede si nu inteleg cum un profesionist nu s-a bagat in proiectul asta propus de mine.
Oricum e o treaba foarte interesanta acest ARDUINO, faci o multime de treaba cu el iar in perspectiva (care ma framanta pe mine) a unui observator remote, e o optiune ieftina si zici tu usor de implementat.
Hai sa vedem ce faci mai departe.
|
|
| Sus |
|
|
nobody
Membru
Data inscrierii: 02 Apr 2010
Mesaje: 5204
Motto: Never ever give up !
Localitate: Nowhere
|
| Trimis: 18 Ian 2012 03:53 Download mesaj |
| Titlul subiectului: |
| |
|
|
Culmea e ca pe SELETEK ai un procesor ARM pe 32 biti (tot de la Atmel) ca sa faca o treaba mult mai simpla decat poate ARDUINO.
Profesionisti in astfel de proiecte nu prea ai sa vezi pentru ca, pur si simplu, nu se merita.
|
|
| Sus |
|
|
Alexandru Savin
Membru

Data inscrierii: 09 Mai 2011
Mesaje: 480
Localitate: Bucuresti
|
| Trimis: 18 Ian 2012 09:16 Download mesaj |
| Titlul subiectului: |
| |
|
|
Salutare!
Felicitari pentru proiect, suna bine.
Ai totusi grija cu impulsurile/sec pentru mpp-uri. La viteze mari apare fenomenul de patinaj electromagnetic si s-a dus tracking-ul. Eu as recomanda motoare brussless DC + encodere, la astea macar esti sigur ca sunt acolo unde vrei.
Alex.
|
|
| Sus |
|
|
|
|
| |
Nu puteti crea un subiect nou in acest forum
Nu puteti raspunde in subiectele acestui forum
Nu puteti modifica mesajele proprii din acest forum
Nu puteti sterge mesajele proprii din acest forum
Nu puteti vota in chestionarele din acest forum
Nu puteti atasa fisiere in acest forum
Puteti descarca fisiere in acest forum
|
|





