| Subiectul anterior :: Subiectul urmator |
|
| Autor |
Mesaj |
Alexandru Savin
Membru

Data inscrierii: 09 Mai 2011
Mesaje: 480
Localitate: Bucuresti
|
 Trimis: 28 Ian 2013 22:01 Download mesaj Trimis: 28 Ian 2013 22:01 Download mesaj |
| Titlul subiectului: |
") |
|
|
Salut!
Erwin, ai dreptate! Probabil am citit ''in diagonala''.
Ca tot era vorba de Arduino :
http://www.google.ro/imgres?imgurl=http://...p;dur=2732
Are si un circuit specializat pentru comanda H-bridge.
555 e suficient de stabil! Poate cumpara o serie de generatie mai noua, gen LM555 nu beta555 cum foloseam noi odata 
Spor,
A
|
|
| Sus |
|
 |
Erwin
Moderator


Data inscrierii: 02 Aug 2008
Mesaje: 9804
Motto: panta rhei
Localitate: Bucuresti
|
| Trimis: 28 Ian 2013 23:16 Download mesaj |
| Titlul subiectului: |
| |
|
|
De circuitul cu 555 mă voi ocupa personal. Trebuie să caut condensator cu tantal în cutia de piese, ar fi mult mai sigur decât un electrolitic obișnuit pentru baza de timp iar rezistențe pot folosi din cele de precizie. Alimentarea va fi printr-un circuit stabilizator la 9V ca să nu varieze cu de tensiunea din baterie. Am să pun schema și detaliile aici.
Până atunci o altă aplicație a circuitului monostabil pe care am făcut-o înainte de sărbători:
https://plus.google.com/u/0/10078896397293...Kz8QFLnWhP
Nu mi-aș face probleme cu vibrațiile, folosind controlerul propus cu micropași mișcarea va fi mult mai lină. Nu se va folosi niciun reductor ci doar un cuplaj simplu.
_________________
bino: 8x22, 7x42, 10x50, 10x80, spotting: 10x46, 20x60
Telescoape RFT70 F/4, 80/900, RFT 110 F/5.5, Meade 90 F/10, ED80 F/6
MTO-11CA 100/1000, Cass Clasic 8"F/15, dobson newt.158/1240 DH, 4"F/4.6
piston AZ mount (R), Vixen GP, minidob |
|
| Sus |
|
|
StarChild
Membru

Data inscrierii: 29 Mar 2011
Mesaje: 1609
Motto: tata si sot in primul rand...restul neesentiale... :-)
Localitate: Timisoara
|
| Trimis: 28 Ian 2013 23:25 Download mesaj |
| Titlul subiectului: |
| |
|
|
@valy: sigur ca ptr inceput si varianta rapida e OK si sa porneasca motorul cand il alimentez, merge cu viteza "calibrata" dupa calcule si niste teste, si apoi nu ma mai ating de ea. iar la capat de cursa pot sa scot piulita si s-o infiletez de mana... dar parca totusi ar fi elegant sa pot s-o infiletez tot cu motorul ala
deci restrangem cerintele:
- buton OnOff ...ptr pornire urmarire
- buton Reset , ca sa revina piulita la inceput (viteza maxima cat se poate, cu sens de rotire inversat decat ala "standard")
|
|
| Sus |
|
|
valy
Membru
Data inscrierii: 21 Iul 2005
Mesaje: 11471
Localitate: Bucuresti
|
| Trimis: 29 Ian 2013 00:04 Download mesaj |
| Titlul subiectului: |
| |
|
|
Motoarele astea se invart destul de repede, cred ca pot cateva (zeci) rotatii pe sec. Ar trebui si un "senzor" cand ajunge la cap sa nu se blocheze. Eventual si la celalalt cap inca unul. Se poate calcula sa compenseze viteza ca sa asigure o viteza unghiulara constanta.
Doua butoane, 1-2 leduri, iese minimalist, dar suficient cred. Softul nu complicat daca mergi pe arduino. Cu restul de sugestii iesi mai ieftin.
|
|
| Sus |
|
|
StarChild
Membru
Data inscrierii: 29 Mar 2011
Mesaje: 1609
Motto: tata si sot in primul rand...restul neesentiale... :-)
Localitate: Timisoara
|
| Trimis: 29 Ian 2013 00:21 Download mesaj |
| Titlul subiectului: |
| |
|
|
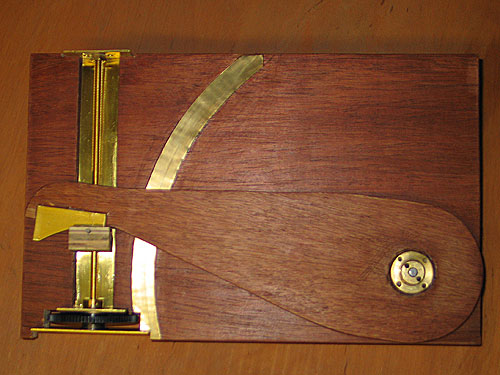
viteza va fi constanta, fiindca "mecanismul" asta e un triunghi isoscel (cele 2 brate au lungime egala intre pivoti)...piulita mobile si prindere motorului si capatul opus al tijeise afla pe rulmenti/pivoti...deci tot timpul voi avea viteza pe RA constanta, nu trebuie compensat nimic. compensare trebuie daca axa tijei este fixa (nu pivoteaza in 2 puncte).
in articolul asta de pe CloudyNights e explicat foarte fain principiul la barn-door (principiu care-l folosesc si eu la "montura" asta) . Zice undeva mai jos care sunt metodele de a compensa variatia de viteza, e folosesc a 2a metoda "Allow the rod to tilt so that it remains in contact with the same spot on the top platform"
senzori la capete vor fi la v2
mie practic imi trebuie o sursa stabilizata, un cuart/generator de tact/etc precis care sa-mi asigure niste intervale de timp contante intre impulsuri, si motorul destul de puternic cat sa nu piarda pasii, cu destul de multi pasi cat sa-mi permita ajustari fine. in rest precizia surubului si a piulitei care ar trebui sa fie OK (eroarea lor nu cred ca o voi sesiza la expuneri atat de scurte) si alinierea polara. De aliniera asta imi e cel mai frica, cred ca aliniera are cea mai mare pondere in cat timp pot face expunere la "montura" asta.
|
|
| Sus |
|
|
cmatei
Membru
Data inscrierii: 09 Sep 2009
Mesaje: 844
Localitate: Bucuresti
|
| Trimis: 29 Ian 2013 00:42 Download mesaj |
| Titlul subiectului: |
| |
|
|
| StarChild a scris: | | viteza va fi constanta, fiindca "mecanismul" asta e un triunghi isoscel (cele 2 brate au lungime egala intre pivoti)...piulita mobile si prindere motorului si capatul opus al tijeise afla pe rulmenti/pivoti...deci tot timpul voi avea viteza pe RA constanta, nu trebuie compensat nimic. compensare trebuie daca axa tijei este fixa (nu pivoteaza in 2 puncte). |
Eroarea e mai mica intr-adevar, dar viteza unghiulara tot nu e constanta. Uite cu derivatele
http://www.keteu.org/posts/a_smart_barn_door_drive.html
sau
http://www.wirralmodelengineeringsociety.c...aMount.pdf
Si da, de alinierea polara trebuie sa-ti fie frica.
EDIT: acum nu te lua dupa noi ca suntem carcotasi, e cel mai fain proiect de "barn door" pe care l-am vazut pana acum.
|
|
| Sus |
|
|
valy
Membru
Data inscrierii: 21 Iul 2005
Mesaje: 11471
Localitate: Bucuresti
|
| Trimis: 29 Ian 2013 00:46 Download mesaj |
| Titlul subiectului: |
| |
|
|
| StarChild a scris: | viteza va fi constanta, fiindca "mecanismul" asta e un triunghi isoscel (cele 2 brate au lungime egala intre pivoti)...piulita mobile si prindere motorului si capatul opus al tijeise afla pe rulmenti/pivoti...deci tot timpul voi avea viteza pe RA constanta, nu trebuie compensat nimic. compensare trebuie daca axa tijei este fixa (nu pivoteaza in 2 puncte).
|
Cred ca-mi joaca feste geometria la orele astea, dar esti sigur ca unghiul variaza liniar cu deplasarea piulitei?
|
|
| Sus |
|
|
StarChild
Membru
Data inscrierii: 29 Mar 2011
Mesaje: 1609
Motto: tata si sot in primul rand...restul neesentiale... :-)
Localitate: Timisoara
|
| Trimis: 29 Ian 2013 00:55 Download mesaj |
| Titlul subiectului: |
| |
|
|
@valy: nu variaza liniar, dar daca te uiti prin graficele din al2lea link pus pe @cmatei o sa vezi ca la solutia asta, la expuneri de pana in 10min eroarea se mentine foarte foarte scazuta...
@cmatei: multam de apreciere ptr "design" dar...nene m-ai spart cu matematicile alea  deci e clar... sunt praf...nu-l gredeam pe profu' din liceu cand imi spunea, ziceam ca are ceva cu mine... deci e clar... sunt praf...nu-l gredeam pe profu' din liceu cand imi spunea, ziceam ca are ceva cu mine...
e interesanta schema aia, dar deja se vorbeste despre tabele, simulari in Matlab... ce sa zic, e cam "tras cu tunul in vrabii" ptr un biet barn-door dar e o informatie valoroasa... poate v2...nu se stie... Arduino, control prin PC, tabele, derivate.l..pana mea... pana ies la pensie am vreme 
ma duc sa dorm ca deja vad numa drivere si C si rahaturi de astea in fata ochilor... astept sa vad ce iese din Autostakkert sa ma minunez oleaca si apoi trec la somn.
|
|
| Sus |
|
|
valy
Membru
Data inscrierii: 21 Iul 2005
Mesaje: 11471
Localitate: Bucuresti
|
| Trimis: 29 Ian 2013 00:59 Download mesaj |
| Titlul subiectului: |
| |
|
|
Da, la unghiuri mici sau deplasari mici nu e bai cu eroare, dar teoretic trebuie compensare. Practic oricum nu reusesti sa aliniezi perfect, sau apar alte probleme.
Calculele sunt simple. Oricum nu le faci tu, ca d'aia dai un milion pe microcontroler .
|
|
| Sus |
|
|
Stanescu Octavian
Membru
Data inscrierii: 02 Apr 2006
Mesaje: 3712
Localitate: Timisoara
|
| Trimis: 29 Ian 2013 02:04 Download mesaj |
| Titlul subiectului: |
| |
|
|
Se poate vedea imediat ca acesta modaliate de a misca pe ascensie este similar cu mecanismul biela manivela . daca se studiaza lectia se vad graficele cu viteza pistonului la o rotatie completa.
si din ochi se vede ca la maxim si minim pistonul are viteza mai mica .
probabil ca la 1-2 min cursa cu expunere nu se simte variatie de viteza .
|
|
| Sus |
|
|
Catalin Paduraru
Membru

Data inscrierii: 08 Mai 2006
Mesaje: 2287
Localitate: Bucuresti
|
|
| Sus |
|
|
tudorandu
Membru


Data inscrierii: 08 Ian 2012
Mesaje: 234
Localitate: CRAIOVA
|
|
| Sus |
|
|
StarChild
Membru
Data inscrierii: 29 Mar 2011
Mesaje: 1609
Motto: tata si sot in primul rand...restul neesentiale... :-)
Localitate: Timisoara
|
| Trimis: 29 Ian 2013 12:06 Download mesaj |
| Titlul subiectului: |
| |
|
|
@tudorandu: multumesc de link...acuma ca am vazut poza imi aduc ca am mai vazut subiectul mai demult dar atunci nu ma pasiona subiectul...
e o solutie mult mai "pamanteana" ptr mine, fiindca pot mai usor sa generez curba aia tangenta decat sa programez microcontrolere/corectii/viteze variabile si altele...
... urmeaza o modificare de design mecanic, din pacate va creste putin gabaritul...electronica ramane cum am stabilit.... v1.1... stay tunned!
|
|
| Sus |
|
|
jimao22
Moderator

Data inscrierii: 12 Apr 2010
Mesaje: 2924
Motto: [descopera lumina]
Localitate: Ploiesti
|
| Trimis: 29 Ian 2013 13:07 Download mesaj |
| Titlul subiectului: |
| |
|
|
| StarChild a scris: |
ramane de vazut daca pot sa primesc un surub/piulita atat de precis, ca impreuna cu cei 400pasi (x32micropasi) ai motorului si driverului pot ajunge sa obtin o viteza suficient de precisa si stabila in timp care sa-mi permita expuneri consistente de 30secunde-1minut la focale mai mari (sa zicem 300mm sau mai mari...adica 500-800mm ) |
Probabil ca precizia surubului nu consta in pasul sau ci in faptul ca este un surub cu bile, avand jocuri spre zero.
Sincronizarea intre turatia motoarelor, pasul surubului si viteza siderala o faci din ajustarea lungimii celor doua brate. Asta e elementul care iti e la indemana sa-l modifici fara probleme astfel incat sa reglezi viteza cu o precizie oricat de mare.
|
|
| Sus |
|
|
StarChild
Membru
Data inscrierii: 29 Mar 2011
Mesaje: 1609
Motto: tata si sot in primul rand...restul neesentiale... :-)
Localitate: Timisoara
|
| Trimis: 29 Ian 2013 14:07 Download mesaj |
| Titlul subiectului: |
| |
|
|
@jimao22: pare mai simplu sa ajustez lungimea bratelor , dar asta nu pot sa fac in realitate intr-un mod destul de precis (sa ajustezi ambele brate exact cu aceeasi distanta)
prefer sa ajustez 1 motor, decat 2 brate ... plus ca deja complica prea mult montura care nu se vrea a inlocui o montura EQ motorizata.
|
|
| Sus |
|
|
|