| Index |
 Index forum
Index forum |
 Autentificare
Autentificare |
 Inregistrare
Inregistrare
|
 Cine este online
Cine este online |
 Galerie imagini
Galerie imagini
|
 Calendar evenim.
Calendar evenim. |
 Cautare detaliata
Cautare detaliata |
 Ghid forum
Ghid forum |
Colaboratori
Te intereseaza un domeniu al astronomiei si ai vrea sa scrii pentru siteul nostru? Alatura-te echipei noastre.
| Statistici forum |
| › |
Numar total de mesaje in forum: 233896 |
| › |
Numar de utilizatori inregistrati: 2834 |
| › |
Cel mai nou utilizator inregistrat: Despinarom |
| › |
|
| › |
Cei mai multi utilizatori conectati au fost 627 la data de Lun Oct 21, 2024 |
| › |
|
| › |
Actualmente sunt 0 utilizatori pe chat
|
| › |
Aceste date se bazeaza pe utilizatorii activi de peste 5 minute |
|
| Legenda |
 |
Mesaje noi |
 |
Nu sunt mesaje noi |
 |
Forumul este inchis |
|
|
| Subiectul anterior :: Subiectul urmator |
|
| Autor |
Mesaj |
Remus Boldis
Membru

Data inscrierii: 03 Iun 2014
Mesaje: 464
Localitate: Buzias
|
| Trimis: 16 Oct 2019 17:51 Download mesaj |
| Titlul subiectului: |
") |
|
|
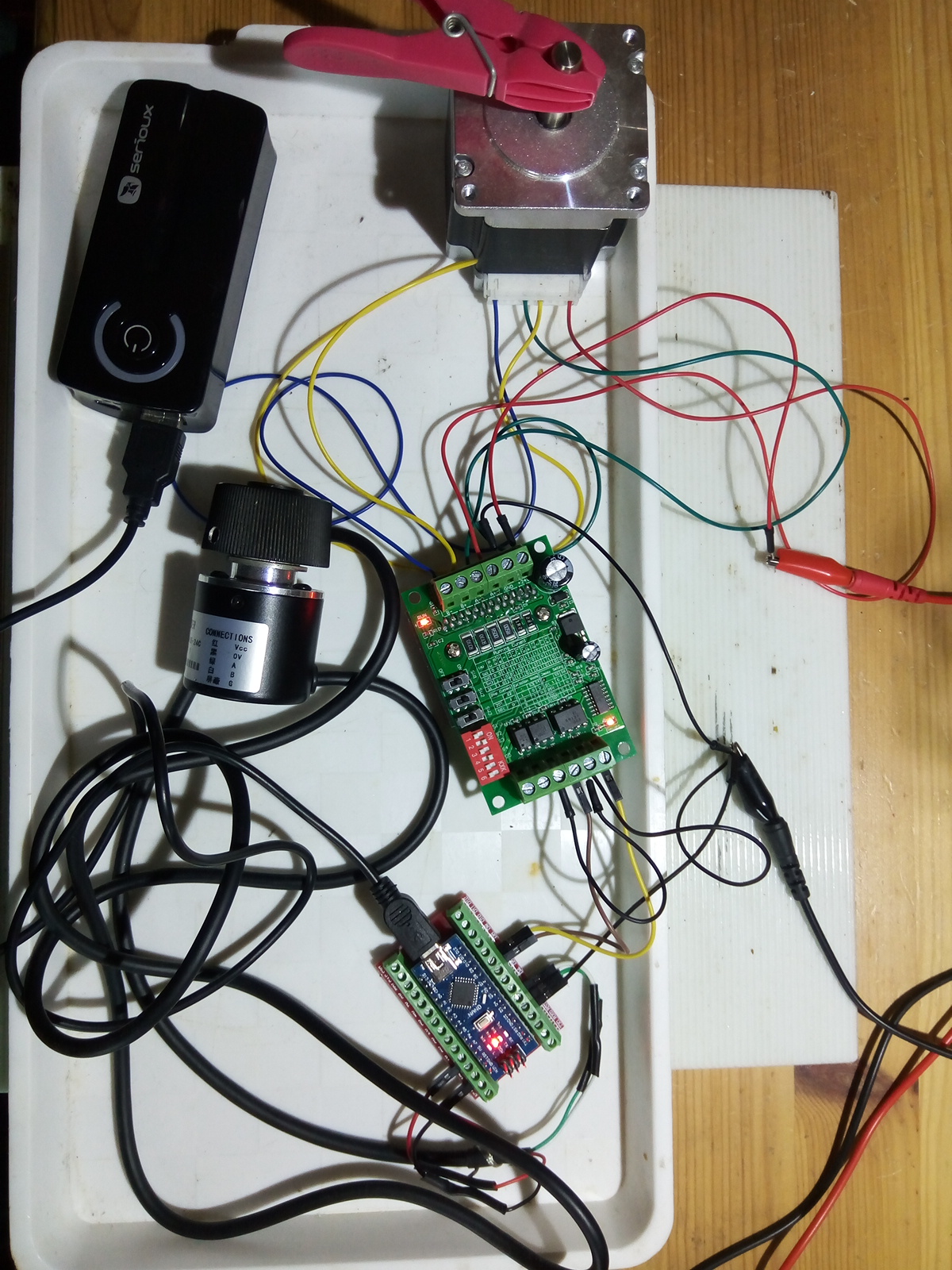
O poza de ansamblu.
| Descriere: |
|
| Marime fisier: |
816.53 kb |
| Vizualizat: |
de 6600 ori |
|
_________________
0770403936 |
|
| Sus |
|
 |
Erwin
Moderator


Data inscrierii: 02 Aug 2008
Mesaje: 9694
Motto: panta rhei
Localitate: Bucuresti
|
| Trimis: 16 Oct 2019 22:54 Download mesaj |
| Titlul subiectului: |
| |
|
|
Ce tip de encoder este? Se pierd paşi la viteză mare de poziţionare?
_________________
bino: 8x22, 7x42, 10x50, 10x80, spotting: 10x46, 20x60
Telescoape RFT70 F/4, 80/900, RFT 110 F/5.5, Meade 90 F/10, ED80 F/6
MTO-11CA 100/1000, Cass Clasic 8"F/15, dobson newt.158/1240 DH, 4"F/4.6
piston AZ mount (R), Vixen GP, minidob |
|
| Sus |
|
|
starbuck
Membru

Data inscrierii: 23 Ian 2011
Mesaje: 1111
|
| Trimis: 16 Oct 2019 23:17 Download mesaj |
| Titlul subiectului: |
| |
|
|
| Problema asta mi-am pus-o si eu. Din cate stiu la motorul DC in acest caz se pierd pasi inevitabil dat fiind inertia ansamblului preconizata la cateva kilograme forta bune si banuiesc ca franarea ar trebui comandata treptat din motor cu o viteza redusa sau descrescatoare inainte de pozitia finala. Volumul de calcul pare destul de mare in acest caz deoarece intra in discutie si masa ansamblului mobil. Poate niste parametrii setati empiric din teste pentru fiecare greutate ar rezolva mai usor problema. Ar mai fi varianta cu schimbarea sensului de rotatie la pozitia finala dar ar putea fi prea solicitanta pentru motor. Eventual o combinatie intre aceste doua metode ar putea asigura o franare lina.
|
|
| Sus |
|
|
Remus Boldis
Membru
Data inscrierii: 03 Iun 2014
Mesaje: 464
Localitate: Buzias
|
| Trimis: 16 Oct 2019 23:17 Download mesaj |
| Titlul subiectului: |
| |
|
|
E un encoder optic (pentru fiabilitate) - 360 de pulsuri pe rotatie, dar se poate folosi un encoder obisnuit, care e foarte ieftin. Daca invarti foarte repede de encoder, desigur ca arduino nu va tine ritmul, dar e nesemnificativ, encoderul e folosit pentru a deplasa montura intr-o directie s-au alta pana la pozitia dorita. Encoderul da comanda de miscare, nu de pozitie. Daca am avea nevoie de afisarea pozitiei am putea afisa pasii motorului. Folosind fractiuni de pasi deplasarea e destul de lenta si nu cred e o problema oprirea (mai ales ca motorul actioneaza printr-o reductie).
_________________
0770403936
Ultima modificare efectuata de catre Remus Boldis la 16 Oct 2019 23:48, modificat de 1 data in total |
|
| Sus |
|
|
starbuck
Membru
Data inscrierii: 23 Ian 2011
Mesaje: 1111
|
| Trimis: 16 Oct 2019 23:43 Download mesaj |
| Titlul subiectului: |
| |
|
|
| Asa este, teoretic suna bine dar avem un motor DC ales tocmai pentru a misca mai rapid sarcini relativ mari comparativ cu stepperul. La stepper dat fiind viteza mai mica este nevoie de luarea in calcul suplimentara si a timpului de pozitionare pentru acuratetea pozitionarii. Acum avand viteza considerabil mai mare a motorului DC comparativ cu motorul stepper s-a pus problema fireasca a franarii generata de natura constructiva unipolara a motorului DC cu capacitate mult mai slaba de franare comparativ cu motorul stepper bipolar.
|
|
| Sus |
|
|
Remus Boldis
Membru
Data inscrierii: 03 Iun 2014
Mesaje: 464
Localitate: Buzias
|
| Trimis: 16 Oct 2019 23:51 Download mesaj |
| Titlul subiectului: |
| |
|
|
Toate montajele prezentate in acest topic sunt cu motoare pas cu pas (NEMA 23 - un motor foarte puternic). Pozitionarea se face de catre operator exact ca la orice montura manuala (cu deosebirea ca invartim un encoder, nu direct rotita monturii). Dupa pozitionare, pornim trakingul (partea aceasta inca nu am implementat-o). Ideia e sa conectez motorul la una din rotitele monturii manuale (in cazul meu Skytee 2).
_________________
0770403936 |
|
| Sus |
|
|
starbuck
Membru
Data inscrierii: 23 Ian 2011
Mesaje: 1111
|
| Trimis: 17 Oct 2019 00:16 Download mesaj |
| Titlul subiectului: |
| |
|
|
Eu m-am referit la testele mentionate in postarile anterioare cu motor DC si am inteles ca pentru el se folosea encoderul, oricum o combinatie obligatorie in acest caz. Desigur, in cazul motorului stepper mentionat oficial pentru implementare franarea n-ar trebui sa fie o problema, e clar ca nu avem viteze de ventilator  . Oricum am considerat util de mentionat la ce sa ne asteptam atunci cand alegem pentru implementare un motor DC sau stepper deoarece ambele tipuri de motoare sunt folosite la motorizarea monturilor (desigur, franarea mentionata de mine se refera la miscarea GO TO, nu de tracking). . Oricum am considerat util de mentionat la ce sa ne asteptam atunci cand alegem pentru implementare un motor DC sau stepper deoarece ambele tipuri de motoare sunt folosite la motorizarea monturilor (desigur, franarea mentionata de mine se refera la miscarea GO TO, nu de tracking).
|
|
| Sus |
|
|
Remus Boldis
Membru
Data inscrierii: 03 Iun 2014
Mesaje: 464
Localitate: Buzias
|
| Trimis: 17 Oct 2019 14:40 Download mesaj |
| Titlul subiectului: |
| |
|
|
Daca doriti sa incercati Arduino Nano, va trebui sa intrati la Tools si sa setati Arduino Uno, portul com 4 (pe alte calculatoare e posibil sa apara alte porturi) si ATmega328P (Old Bootloader).
Programul de comada motor folosind un encoder (se ia cu copy-paste) :
/*******Interrupt-based Rotary Encoder Sketch*******
by Simon Merrett, based on insight from Oleg Mazurov, Nick Gammon, rt, Steve Spence
*/
const int pinA = 2; // Our first hardware interrupt pin is digital pin 2
const int pinB = 3; // Our second hardware interrupt pin is digital pin 3
const int stepPin = 7; // pin for pulsing a step to the stepper driver
const int dirPin = 6; // pin for setting stepper driver direction
const bool CW = 0; // clockwise rotation direction (viewed from encoder body out toward shaft--like CNC Machines)
const bool CCW = 1; // counter-clockwise rotation direction (see above, these directions appear reverse when viewed from shaft side)
volatile byte aFlag = 0; // let's us know when we're expecting a rising edge on pinA to signal that the encoder has arrived at a detent
volatile byte bFlag = 0; // let's us know when we're expecting a rising edge on pinB to signal that the encoder has arrived at a detent (opposite direction to when aFlag is set)
volatile byte reading = 0; //somewhere to store the direct values we read from our interrupt pins before checking to see if we have moved a whole detent
volatile long encoderPos = 0; //this variable stores our current value of encoder position. Change to int or uin16_t instead of byte if you want to record a larger range than 0-255
volatile int encoderPosOld = 0; //stores the last encoder position value so we can compare to the current reading and see if it has changed (so we know when to print to the serial monitor)
volatile bool encoderDir = CW; // stores the direction of rotation clockwise = 0 or counter-clockwise = 1
void setup() {
pinMode(pinA, INPUT_PULLUP); // set pinA as an input, pulled HIGH to the logic voltage (5V or 3.3V for most cases)
pinMode(pinB, INPUT_PULLUP); // set pinB as an input, pulled HIGH to the logic voltage (5V or 3.3V for most cases)
pinMode(stepPin,OUTPUT);
pinMode(dirPin,OUTPUT);
attachInterrupt(0,PinA,RISING); // set an interrupt on PinA, looking for a rising edge signal and executing the "PinA" Interrupt Service Routine (below)
attachInterrupt(1,PinB,RISING); // set an interrupt on PinB, looking for a rising edge signal and executing the "PinB" Interrupt Service Routine (below)
Serial.begin(115200); // start the serial monitor link
}
void PinA() {
cli(); //stop interrupts happening before we read pin values
reading = PIND & 0xC; // read all eight pin values then strip away all but pinA and pinB's values
if(reading == B00001100 && aFlag) { //check that we have both pins at detent (HIGH) and that we are expecting detent on this pin's rising edge
encoderPos --; //decrement the encoder's position count
encoderDir = CW;
digitalWrite(dirPin, encoderDir);
digitalWrite(stepPin, HIGH);
//delayMicroseconds(5);
digitalWrite(stepPin, LOW);
if (encoderPos <2147483648L> 2147483647L) {
encoderPos = 0L;
}
bFlag = 0; //reset flags for the next turn
aFlag = 0; //reset flags for the next turn
}
else if (reading == B00001000) aFlag = 1; //signal that we're expecting pinA to signal the transition to detent from free rotation
sei(); //restart interrupts
}
void loop() {
if(encoderPosOld != encoderPos) {
Serial.print(encoderPos);
if(encoderDir == CW) Serial.println(" CW");
if(encoderDir == CCW) Serial.println(" CCW");
encoderPosOld = encoderPos;
}
}
_________________
0770403936 |
|
| Sus |
|
|
Erwin
Moderator
Data inscrierii: 02 Aug 2008
Mesaje: 9694
Motto: panta rhei
Localitate: Bucuresti
|
| Trimis: 20 Oct 2019 21:53 Download mesaj |
| Titlul subiectului: |
| |
|
|
Aha, am înţeles acum. Ar trebui să pui o manivelă la roata de acţionare.
Acest mod de lucru se potriveşte mănuşă pentru motorizarea unui focuser, desigur, cu afişarea paşilor este mai indicat.
Eu am pus 2 butoane push la motofocuser pentru că mi s-a părut obositor să învârt de rotiţă. Butoanele push le-am programat astfel: la început e o buclă de 5 sau 10 paşi cu delay mare, dacă butonul e apăsat în continuare atunci delay-ul scade pentru încă 100 de paşi apoi nu mai există delay. Am aşadar 3 viteze de rotaţie diferite, doar ţinând apăsat un buton. Al doilea buton face acelaşi lucru, în direcţia opusă.
_________________
bino: 8x22, 7x42, 10x50, 10x80, spotting: 10x46, 20x60
Telescoape RFT70 F/4, 80/900, RFT 110 F/5.5, Meade 90 F/10, ED80 F/6
MTO-11CA 100/1000, Cass Clasic 8"F/15, dobson newt.158/1240 DH, 4"F/4.6
piston AZ mount (R), Vixen GP, minidob |
|
| Sus |
|
|
starbuck
Membru
Data inscrierii: 23 Ian 2011
Mesaje: 1111
|
| Trimis: 20 Oct 2019 22:01 Download mesaj |
| Titlul subiectului: |
| |
|
|
| La motofocuser sunt mult mai bune butoanele externe prin cablu sau bluetooth deoarece se evita vibratiile provocate de atingerea cu mana mai ales la magnificatii mari. La montura e clar ca actionarea poate fi oricum desi personal m-am obisnuit prin actionare externa in cazul motorizarii.
|
|
| Sus |
|
|
Erwin
Moderator
Data inscrierii: 02 Aug 2008
Mesaje: 9694
Motto: panta rhei
Localitate: Bucuresti
|
| Trimis: 21 Oct 2019 22:23 Download mesaj |
| Titlul subiectului: |
| |
|
|
Motofocuserul are unitatea de comandă separat, pe cablu.
_________________
bino: 8x22, 7x42, 10x50, 10x80, spotting: 10x46, 20x60
Telescoape RFT70 F/4, 80/900, RFT 110 F/5.5, Meade 90 F/10, ED80 F/6
MTO-11CA 100/1000, Cass Clasic 8"F/15, dobson newt.158/1240 DH, 4"F/4.6
piston AZ mount (R), Vixen GP, minidob |
|
| Sus |
|
|
Remus Boldis
Membru
Data inscrierii: 03 Iun 2014
Mesaje: 464
Localitate: Buzias
|
| Trimis: 21 Oct 2019 23:30 Download mesaj |
| Titlul subiectului: |
| |
|
|
La motofocuser ar fi interesanta comanda prin telecomanda radio sau infrarosu, ca sa scapi de un cablu urat si incomod. Dupa ce vine frigul si stam mai mult prin case, vreau sa fac un motofocuser telecomandat. La aceasta aplicatie motorul pas cu pas nu mai e o necesitate, un motor clasic de curent continuu dotat cu reductie ar face o treaba buna.
_________________
0770403936 |
|
| Sus |
|
|
Erwin
Moderator
Data inscrierii: 02 Aug 2008
Mesaje: 9694
Motto: panta rhei
Localitate: Bucuresti
|
| Trimis: 22 Oct 2019 07:34 Download mesaj |
| Titlul subiectului: |
| |
|
|
Motorul pas cu pas permite poziţionarea precisă, fără encoder, la acelaşi plan focal, eventual compensat cu temperatura. De asemenea, pentru că se foloseşte Arduino Nano sau Micro se poate lega la calculator prin USB. Eu l-am făcut iniţial doar pentru astrofoto dar la cassegrain care este mare şi vibrează uşor pe montură este util şi la vizual. Desigur, la vizual merge şi cu motor de CC şi cu telecomandă radio, cred că merge una de la o jucărie .
_________________
bino: 8x22, 7x42, 10x50, 10x80, spotting: 10x46, 20x60
Telescoape RFT70 F/4, 80/900, RFT 110 F/5.5, Meade 90 F/10, ED80 F/6
MTO-11CA 100/1000, Cass Clasic 8"F/15, dobson newt.158/1240 DH, 4"F/4.6
piston AZ mount (R), Vixen GP, minidob |
|
| Sus |
|
|
Remus Boldis
Membru
Data inscrierii: 03 Iun 2014
Mesaje: 464
Localitate: Buzias
|
| Trimis: 22 Oct 2019 11:28 Download mesaj |
| Titlul subiectului: |
| |
|
|
Telecomanda e deja luata, de la poporul prieten, chinez.
| Descriere: |
|
| Marime fisier: |
822.69 kb |
| Vizualizat: |
de 6394 ori |

|
_________________
0770403936 |
|
| Sus |
|
|
Remus Boldis
Membru
Data inscrierii: 03 Iun 2014
Mesaje: 464
Localitate: Buzias
|
|
| Sus |
|
|
|
|
| |
Nu puteti crea un subiect nou in acest forum
Nu puteti raspunde in subiectele acestui forum
Nu puteti modifica mesajele proprii din acest forum
Nu puteti sterge mesajele proprii din acest forum
Nu puteti vota in chestionarele din acest forum
Nu puteti atasa fisiere in acest forum
Puteti descarca fisiere in acest forum
|
|





